 |
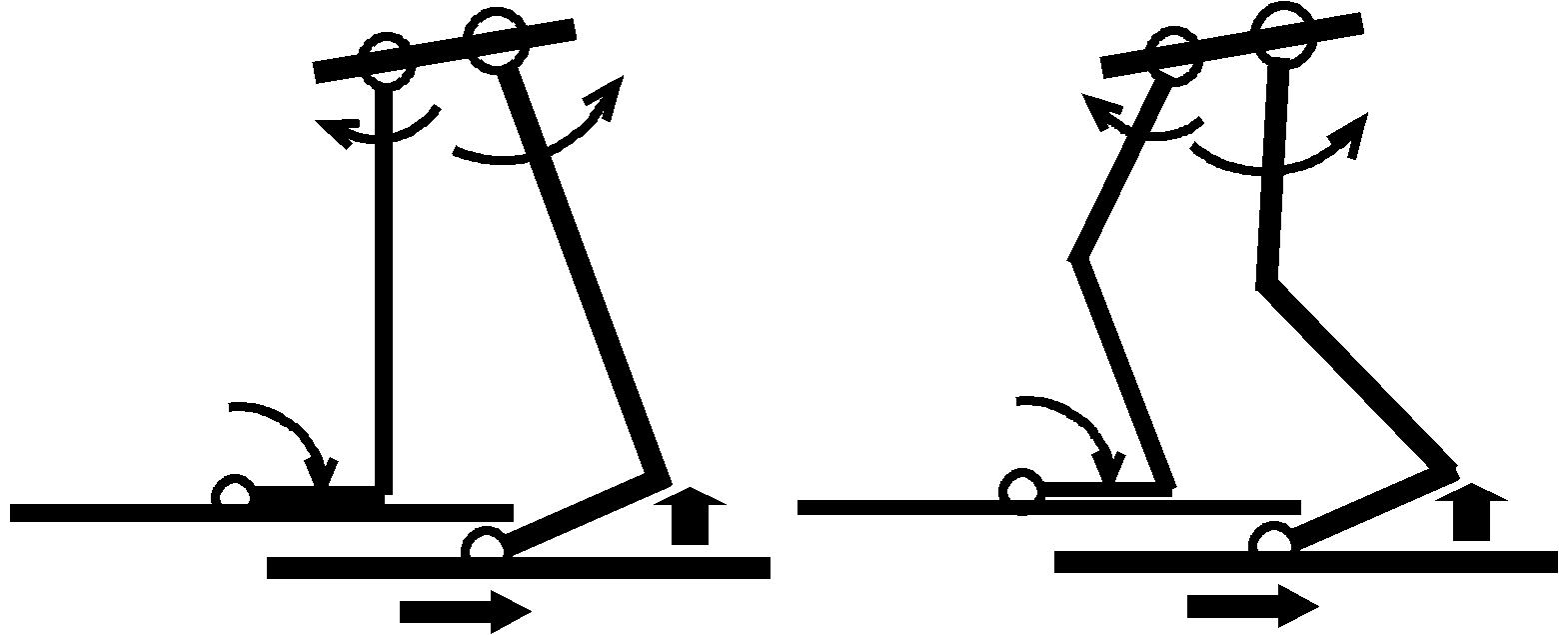 |
| 一般的にスキーヤーは,ターン内スキーを前方に外スキーを後方にした外向傾姿勢でターンを行う.それに対してテレマーカーは,ターン外スキーを前方に,内スキーを後方かつ踵を持ち上げたヒールフリーでターンを行う.テレマーカーがどのようにターン内足の踵を浮かせ,スキーに角付けを行い,さらに左右のエッジを切り替えて連続ターンを行っているのか? まずテレマーク姿勢の特徴であるヒールフリーの機構について考察する.左図のように,L字型セグメントの下端前方(○印)はスキーと蝶番で連結されているものとする.L字型セグメントの上端(○印)を中心として後方に回転させると,スキーは後方へ移動し,踵を想定したところ(90度に曲がったところ)が持ち上がり,上端(○印)は少し上方に移動する.さらに上端を後方に回転させると,スキーがさらに後方に移動し,踵が持ち上がり上端(○印)が下降する. 次に右図のように,腰部材の両端に取り付けたL字型セグメントのL字型の先端(つま先側○印)とスキー部材を蝶番で連結した剛体リンクモデルを想定する.つまり腰部材の長軸を中心軸として,左右のL字型セグメントが回転する4関節2脚リンクモデルである.このモデルを直立させた状態から,片側のL字型セグメントの上端(腰部)を後方に回転させると,同側のヒールフリーと同側のスキーが後側に移動する. テレマーカーの動作に当てはめてみれば,直立姿勢から足関節と膝関節を固定して,片側の股関節の伸展(後方回転)を行えば,伸展した側のヒールフリーとスキーが後方に移動する. |
|
|
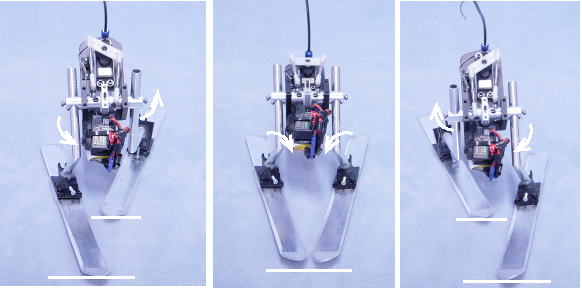
連続ターンができるプルークテレマークモデルのヒールフリーの様子を、横から見た図と正面から見た図を下に示した.左右の股関節をそれぞれ30度内旋した状態で固定したプルーク姿勢から,右股関節の屈曲と左股関節の伸展を行うと,右スキーが左スキーに対して前方かつ左ヒールフリーのプルークテレマーク姿勢になる.次に,左股関節の屈曲と右股関節の伸展を行えば,左スキーが右スキーに対して前方かつ右ヒールフリーのプルークテレマーク姿勢になる. |
 |
 |
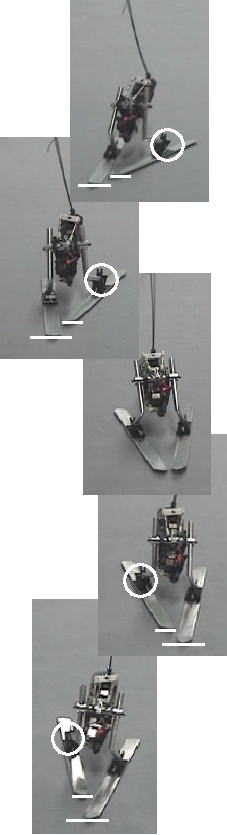
この股関節の内旋と股関節の屈曲・伸展によるプルークテレマークモデルを連続ターンさせるには,例えば,図の連続写真の最上部のように,プルーク姿勢から右股関節の屈曲と左股関節の伸展により,プルークで右スキーが前方かつ左ヒールフリーの姿勢をとる.すると両スキーがサイドカットのないスキーにもかかわらず,左ターンが生じる.次に左股関節の屈曲と右股関節を伸展することにより,プルーク姿勢に戻る.さらに左股関節の屈曲と右股関節の伸展を行うことにより,左スキーが前方かつ右ヒールフリーで右ターンが生じた.このように両股関節を内旋することによりプルーク姿勢がとれ,左右股関節の屈曲と伸展によりプルークでの連続テレマークターンが再現できた. まとめ テレマークの連続プルークターンができるロボットモデルを開発した.足関節と膝関節は固定し,踵が浮き上がるように蝶番を足底とスキーの間に取り付けた.使用したスキーは,サイドカットがないスキーであった. 両股関節を内旋してプルーク姿勢をとる.このプルーク姿勢から,左股関節の屈曲と右股関節の伸展あるいは右股関節の屈曲と左股関節の伸展を行えば,股関節を伸展した側の足がヒールフリーになった.同時に股関節を屈曲した側のスキーは前方に位置した. うまくタイミングを合わせるとプルークによる連続テレマークターンを再現することができた. 詳しくは,清水史郎,長谷川健二(2009) テレマークスキーロボットの開発−股関節の屈曲と伸展および股関節の内旋によるプルークターンモデル−,スキー研究,6(1),9-14. をご覧ください. |
 |
![]()