 |
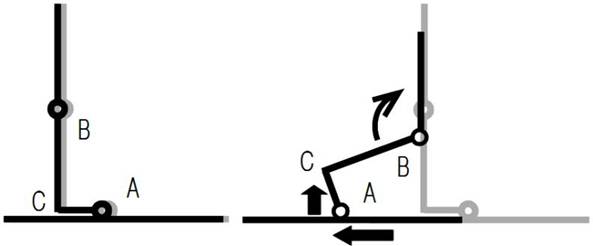
| 図のように,脚型を想定した左右の大腿と左右の下腿(足を含む)からなるモデルを想定する.足と下腿にみたてた左右のL字型セグメントの下端先端(A点)はスキー部材とピン接合し,膝関節(B点)を回転軸として左右のL字型セグメントが回転できる4関節リンクモデルを考える.このモデルの直立姿勢)から,片側のL字型セグメントの上端(B点)を中心に後方に回転させると,図のように踵に相当する部位(C点)が浮き上がり,同時にスキーが後方に移動する. |
| |
|
|
 |
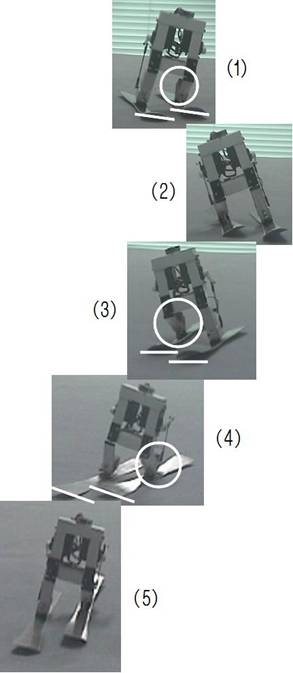
そこで図の連続写真のように,モデルの左膝関節を屈曲して右膝関節を伸展した状態で斜面に置く.するとテレマークターン・モデルとスキーの系全体は左側に傾き内傾姿勢をとり,両スキーのターン内側のエッジが角付けされる.また左足はヒールフリーになり,かつ後方に移動する.このようなテレマーク姿勢でテレマークターン・モデルを滑らせると,有効サイドカーブに沿って左ターンが生じた.次に左膝関節を伸展し右膝関節を屈曲するとテレマークターン・モデルとスキーの系全体は右側に傾き内傾姿勢をとり,両スキーのターン内エッジが角付けされる.また右足はヒールフリーになり後方に移動する.このようにして,左右の膝関節の屈曲と伸展により,連続パラレルテレマークターンが再現できた. まとめ 直立姿勢から,左膝関節の屈曲と右膝関節の伸展あるいは右膝関節の屈曲と左膝関節の伸展により,両スキーがパラレルを保ったまま,膝関節を屈曲した側にヒールフリーが生じ,膝関節を屈曲した側のスキーが後方に移動して左右のスキーに前後差が生じた.さらに膝関節を屈曲した側にモデルとスキーの系全体が傾き,スキーはパラレルのまま両スキーのターン内エッジが角付けされた.ここで有効サイドカーブが生じるスキーを用いると,テレマーカーが行っているようなテレマーク姿勢でパラレルによるテレマークターンを再現することができた. 詳しくは,清水史郎,長谷川健二,野尻奈央子(2010) テレマークスキーロボットの開発−膝関節の屈曲と伸展によるパラレルターン・モデル−,スキー研究,7(1),21-26. をご覧ください. |
 |
![]()