 |
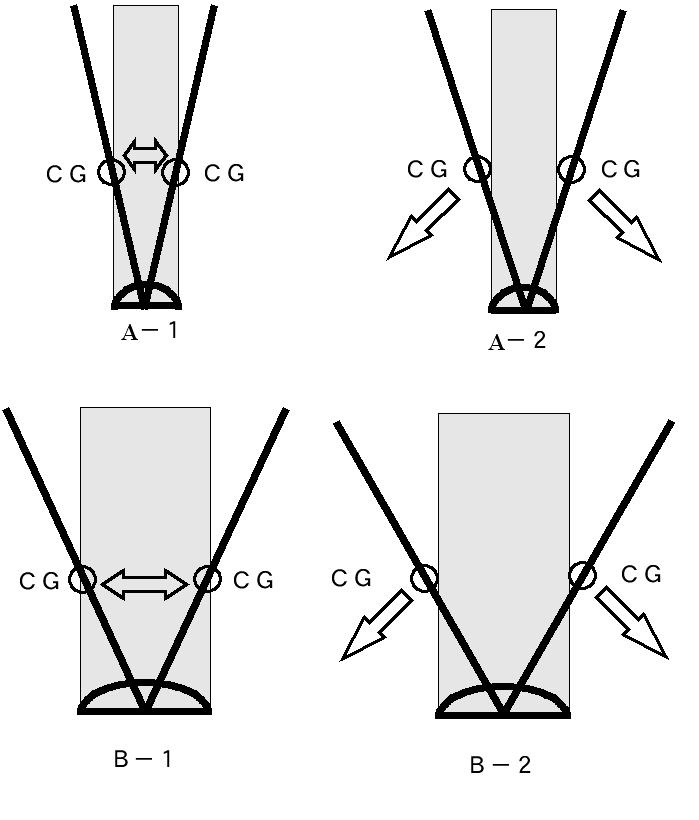
スノーボードを角付けして、バランスを保つことは困難である。そこで図のように、スノーボードと直方体のスノーボーダーの単純なモデルを想定した。スノーボードの幅の範囲内で、重心位置が左右に傾いてもSS系(スノーボードとスノーボーダーの系)は転倒することはない(A-1、B-1)。しかし、スノーボードの幅を超えて重心位置が移動するとSS系は転倒する(A-2、B-2)。また、重心の移動に対して、スノーボードの幅が狭い場合には、安定性が悪く(A-2)、幅が広い場合には、安定性が良くなる(B-1)。そこで、スノーボードの幅は、ある程度広くとることにより、左右への安定性を高めることができる。しかしながら、あまりスノーボードの幅が広すぎても、今度は角付けを切り替える際に、重心の左右への移動を大きくしなくてはならない。また、仮にスノーボードの幅の範囲内であっても、重心の移動に伴ってスノーボードの角付けがわずかながら生じる。さらに、静止した状態で支持基底面を重心位置が大幅に越えてしまうと角付けが急激に起こり、SS系は転倒する。 |