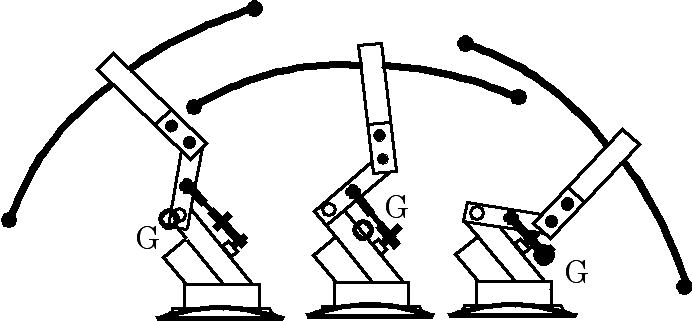
| 図には、膝関節の屈曲・伸展モデルの姿勢変化を模式図として示した。ここで膝関節を伸展させると体幹部と大腿部がフロントサイドに移動し(図(左))、スノーボーダーは前方に立ち上がった姿勢になる。また膝関節を屈曲すると体幹部と大腿部がバックサイドに移動し(図(右))、後方へ沈み込んだ姿勢になる。 |
|
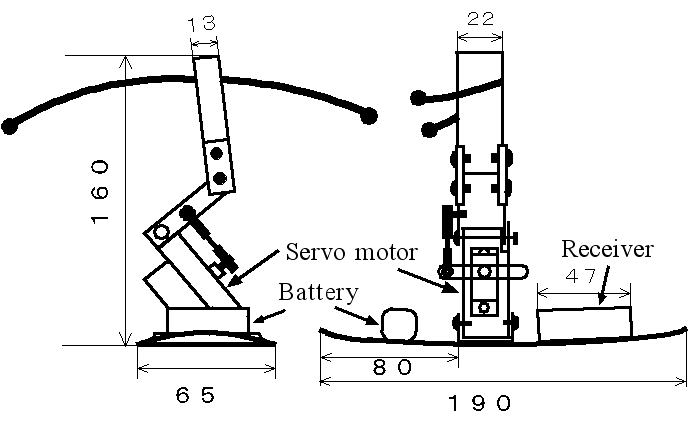
| スノーボードの長さは190 mm、ショルダー65 mm、ウェスト45 mm、ヒール55 mmであった。スノーボードの部材はアルミ(厚さは1.5 mm)であり、スノーボードの下側に凸(約4 mm)となるように曲げた。またスノーボードのおおよそのサイドカットの半径は230 mmであった。現実のスノーボードに対しては少し幅広になっている。スノーボードロボットの大きさは、下腿長70 mm、大腿長50 mm、体幹長75 mmであり、足関節は55度,股関節は125度に固定した。そして膝関節は100度を標準として、屈曲と伸展ができるようにサーボモータ1個により動作させた。 |
 |
|
| この膝関節の屈曲・伸展モデルを連続ターンさせるには、例えば図の連続写真のように、まず直滑降からスノーボーダーの膝関節を屈曲させてバックサイドターン(山回り)をする。そして膝関節を伸展すると、重心位置はスノーボーダーの前方上側に移動して、スノーボードのフロントサイドにSS系が傾く.そしてスノーボードの右側の有効サイサイドカーブが働き,フロントサイドターンが行われる。次に膝関節を屈曲するとスノーボーダーの重心位置は後方下側に移動して、スノーボードの左側の有効サイドカーブが働くようになり、バックサイドターンが行われる。このように膝関節の屈曲・伸展の1自由度の動作を繰り返すことにより、スノーボードの連続ターンを行うことができた。このモデルの連続ターンの特徴は、バックサイドターンでは膝関節を屈曲するので、腰掛けたような低い姿勢になり、フロントサイドターンでは前方に立ち上がった高い姿勢になる。 |
 |
| スノーボードには、ある程度の幅を持たせた。そしてスノーボードに有効サイドカーブが働くように,サイドカットのあるスノーボードを使用した。装着した1個のサーボモータは目視により制御されるが、膝関節の屈曲・伸展により、スノーボーダーをターンの内側に傾けるだけで連続ターンが可能になった。つまりフロントサイドターンでは,膝関節を伸展する動作が有効であり、バックサイドターンでは、膝関節を屈曲する動作が有効であった。 清水史郎 長谷川健二:スノーボードロボットの開発-膝関節の屈曲・伸展モデルと股関節の屈曲・伸展モデル-.スキー研究,3(1),1-9,2005. |
![]()