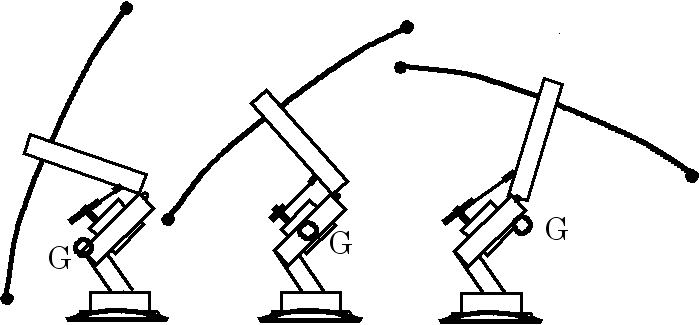
| 図には、股関節の屈曲・伸展モデルの姿勢変化を模式図として示した。股関節を屈曲すると体幹部がフロントサイドに移動し(図(左))、スノーボーダーは腰を折り曲げた姿勢になる。また股関節を伸展すると体幹部がバックサイドに移動し(図7(右))、反り返った姿勢になる。 つまり股関節の屈曲・伸展モデルにおいて,スノーボードの右側のエッジを角付けして重心位置をフロントサイドに移動するためには、股関節を屈曲すればよい。またバックサイドに角付けして重心位置を移動するためには,股関節を伸展すればよい。 |
|
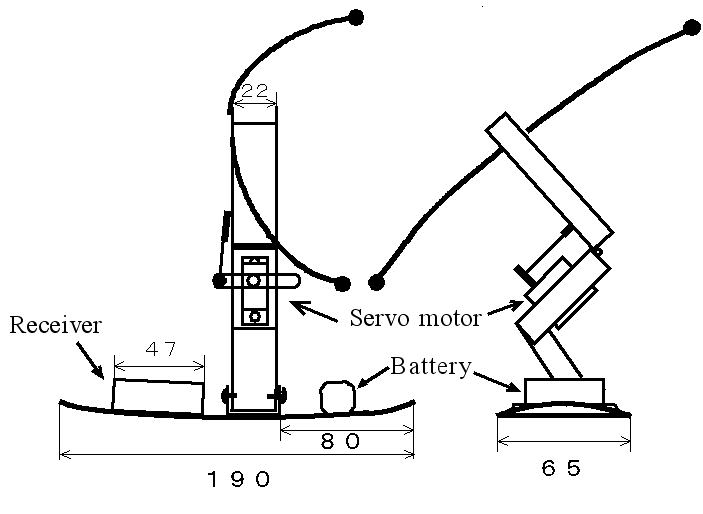
| 図には、股関節の屈曲・伸展モデルの構造を示した.スノーボードロボットの大きさは、下腿長50
mm、大腿長60 mm、体幹長100 mmであり、足関節は55度、膝関節は100度に固定した。そして、股関節は90度を標準として、屈曲と伸展ができるようにサーボモータ1個で動作させた。このように、スノーボーダーの足関節と膝関節を固定して、股関節の屈曲と伸展だけが許されるモデルを製作した。スノーボードとスノーボーダーの取り付けは、90度のノーマルスタンスとした。またスノーボーダーは105g、スノーボード(レシーバ、バッテリーを含む)は85gであり、全質量は190gであった。 |
 |
|
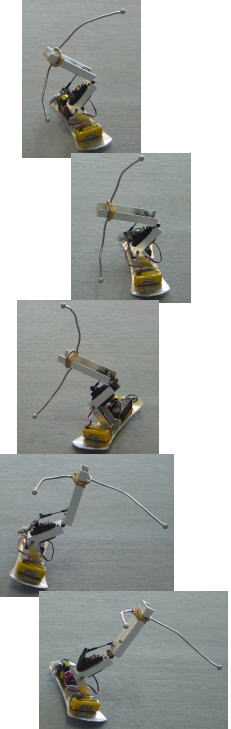
| 図には、股関節の屈曲・伸展モデルの連続ターンの様子を示した。この股関節の屈曲・伸展モデルを連続ターンさせるには、例えば図の連続写真のように、スノーボーダーの股関節を屈曲すると、重心位置はスノーボーダーの前方下側に移動してフロントサイドに傾くようになる。するとスノーボードの右側の有効サイドカーブが働き、フロントサイドターンが行われる。次に股関節を伸展するとスノーボーダーの重心位置は後方上側に移動して反り返ったような姿勢になり、左側の有効サイドカーブが働いてバックサイドターンが行われる。 |
 |
| スノーボードの連続ターンができる股関節の屈曲・伸展モデルを開発した。スノーボードには、ある程度の幅を持たせた。またスノーボードに有効サイドカーブが働くように、サイドカットのあるスノーボードを使用した。それぞれのモデルに装着した1個のサーボモータは目視により制御されるが、スノーボーダーをターンの内側に傾けるだけで連続ターンが可能になった。つまりフロントサイドターンでは、股関節を屈曲する動作が有効であった。またバックサイドターンでは、股関節を伸展する動作が有効であった。 清水史郎 長谷川健二:スノーボードロボットの開発-膝関節の屈曲・伸展モデルと股関節の屈曲・伸展モデル-.スキー研究,3(1),1-9,2005. |
![]()