Robot Models for Skiing and Snowboarding
| Shiro Shimizu (University of Fukui) |
 |
|
|
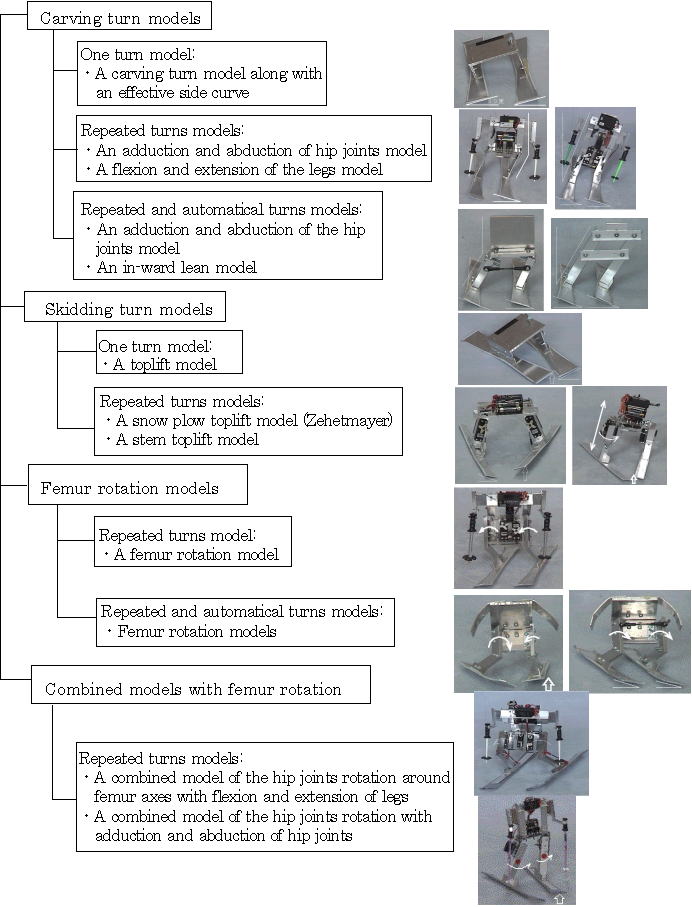
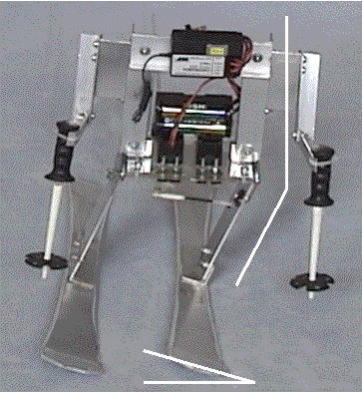
Fig. 1 Structure figure (The system) and feature of the skiing models |
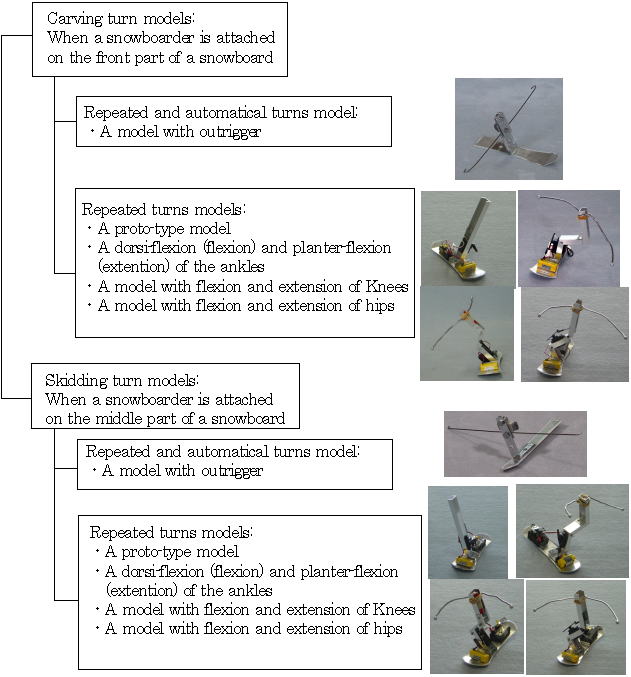 |
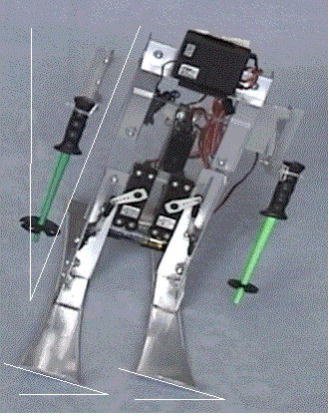
| Fig. 2 Structure figure and feature of the snowboarding models |
 |
||||
| Straight downhill running posture | ||||
 |
 |
 |
||
| Snow plow posture | Traverse posture | |||
| Fig. 3 Relation of straight downhill running posture, snow plow posture, and traverse posture | ||||
 |
 |
 |
| Fig.4 Snow plow turn | Fig,5 Stem turn | Fig. 6 Parallel turn |
2. The combined model (Fig. 7) can rotate the femur around its longitudinal axes and also can flex and extend the legs. This model was able to reproduce many turn techniques performed in actual skiing. That is, turn techniques such as snow plow turns, stem turns and parallel turns (wedeln) - in every case by upward and downward motions.
 |
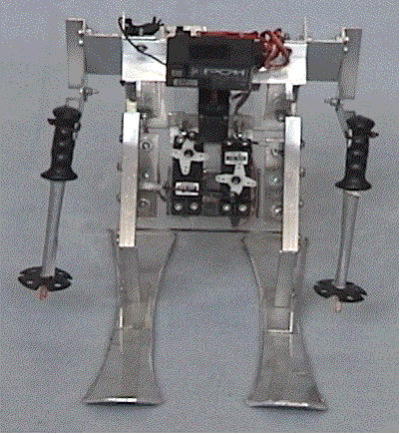
| Fig. 7 Stem turn: Combination of flexion/extension of the legs with femur rotation around its axis |
3. A carving turn evokes when the shaped skis, which produces an effective side curve, was used and when it edged on a ski. Also reproduced by the robots were: the carving turn models also able to do adduction and abduction in the hip joints (Fig. 8), also able to do flexion and extension of the legs model (Fig. 9) and an inward-lean model (Fig. 10).
 |
 |
 |
| Fig. 8 A model of adduction and abduction in the hip joints |
Fig. 9 A model of flexion and extension of the legs |
Fig. 10 An inward-lean model |
4. The top of the inside ski in a snow plow (skidding turn) is lifted as in fig. 11 (toplift model): performing a stem turn (skidding turn) the top of the inside ski is lifted, too (Fig. 12).
 |
 |
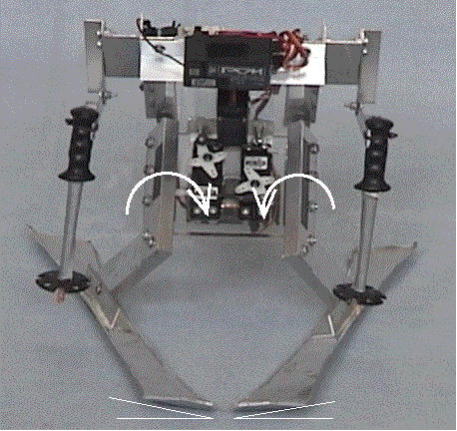
| Fig. 11 A snow plow toplift model (Zehetmayer model) | Fig. 12 A stem toplift model |
5. Inner rotation of the outside femur in a turn showed that it is the most important element for a turn in the skier's movement, thus having application to skiing instructions: from the femur rotation model, the combined model of the femur rotation with the flexion and extension of legs (Fig. 7), and the combined model of femur rotation with an adduction and abduction in the hip joints (Fig. 13). Moreover, as shown in Fig. 14, it was shown clearly that the system of the fundamental skiing postures and turn techniques could be summarized by aspect of femur rotation.
 |
|
| Fig. 13 A combined model of femur rotation with adduction and abduction in the hip joints |
 |
|
| Fig.14 the system of the fundamental skiing postures and turn techniques |
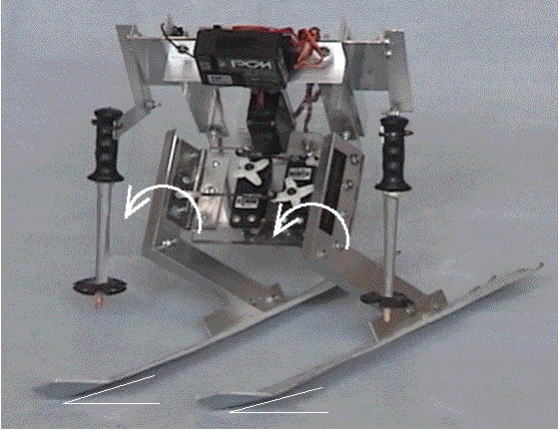
6. If the side-cut of the skis comes in contact with the snow by bending the snowboard, an 'effective side-curve' can occur. The snowboard then runs along this effective side-curve (carving turn). This model makes a downhill turn and a sequential uphill turn along the effective side-curve (Fig. 15). When a snowboarder is weighting intensively on the front part of a snowboard, the snowboarder/snowboard system (SS) is able to do a skidding turn (Fig. 16).
 |
 |
| Fig. 15 A snowboard model with outriggers for repeated and automatic carving turns | Fig. 16 A snowboard model with outriggers for repeated and automatic skidding turns |
7. The proto-type model of a snowboarding system leans forward (to the front-side) or backward (to the back-side). The proto-type model performs a front-side turn, when the model leans to the front-side, and the model performs a back-side turn, when the model leans to the back-side (Fig. 17): To perform a front-side turn, the model (Fig. 18) flexes the ankle (dorsi-flexion) and to perform a back-side turn, it extends the ankle (plantar-flexion). To perform a front-side turn, it extends the knee, and to perform a back-side turn, it flexes the knee (Fig. 19). To perform a front-side turn, it flexes the hip and to perform a back-side turn, it extends the hip (Fig. 20). By means of construction, use, observation and analysis of such models, we can conclude some important aspects to snowboard motion. For example, the edging and displacement of the snowboarder's center of gravity to the inside of a turn are the important motions for achieving turns at snowboarding. Especially through displacement of the snowboarder's center of gravity to the front side of a snowboard, a snowboarder's ability to make a skidding turn is facilitated.
 |
 |
| Fig. 17 A proto-type model of a snowboarding system |
Fig. 18 A model with dorsi-flexion (flexion) and planter-flexion (extension) of the ankles |
 |
 |
| Fig. 19 A model with flexion and extension of the ankles |
Fig. 20 A model with flexion and extension of the hips |