| Shiro Shimizu (Fukui-Universität) |
Um Ski-Roboter und Snowboard-Roboter zu entwickeln, die modellieren, wie Skifahrer auf Skiern und Snowboarder auf dem Snowboard Schwünge ausführen, ist es notwendig die Grund-Mechanismen des Skifahrens und des Snowboardens zu verstehen. Überdies kann die erfolgreiche Entwicklung solcher Modelle Anwendungen für das Lehren und Lernen des Skifahrens und Snowboardens haben. Es muss jedoch beachtet werden, dass die Bewegungen eines Skifahrers und eines Snowboarders komplex sind. Folglich ist es erforderlich sachgemäß zu modellieren, um das Prinzipielle herauszubekommen. Ungeachtet dieser problematischen Komplexität ist es gelungen, Ski- und Snowboad-Roboter zu entwickeln, die schließlich fähig sind, mit einfachen und überschaubaren Bewegungen Schwünge auszuführen. Die Ski-Roboter, die ich konstruiert habe, lassen sich nach folgenden Typen einteilen: (1) Modelle für Carving-Schwünge, bei denen sich die Skier entlang den bogenformigen Kanten ( Taillierung / Biegung der Ski ) bewegen, (2) Modelle für gedriftete Schwünge, (3) Modelle mit Oberschenkel-Rotation um seine Längsachse und (4) Modelle, die mit der genannten Oberschenkel-Rotation kombiniert sind. Es gibt folgend Typen von Snowboard-Robotern: (1) Ein Carving-Schwung-Modell mit Ausleger, der Schwungwiederholungen ermöglicht; (2) ein Modell für gedriftete Schwünge mit Ausleger (Schwungwiederholungen); (3) ein Prototyp-Modell; (4) ein Modell mit Beugung (Dorsal-Extension) und Streckung (Plantar-Flexion) der Fußgelenke; (5) ein Modell mit Beugung und Streckung der Knie; und (6) ein Modell mit Beugung und Streckung der Hüftengelenk.
 |
|
Abb.1 Systematik und Charakterisierung von Ski-Modellen |
 |
| Abb.2 Systematik und Charakterisierung von Snowboard-Modellen |
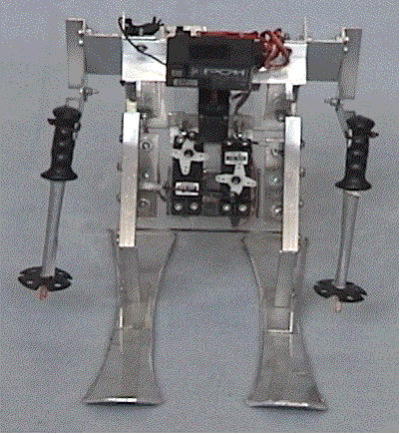
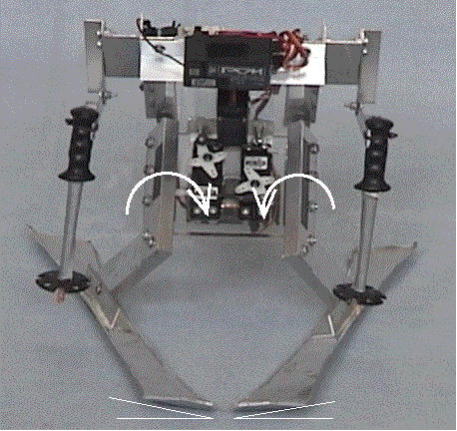
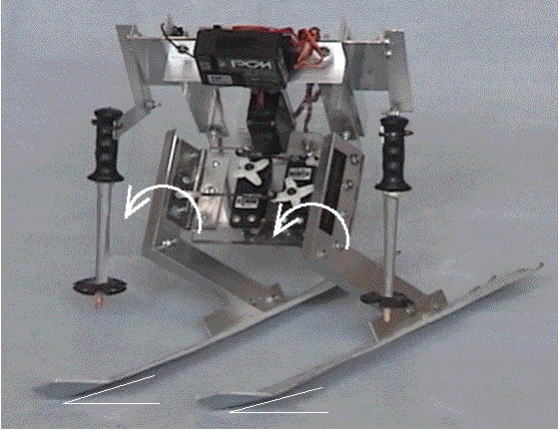
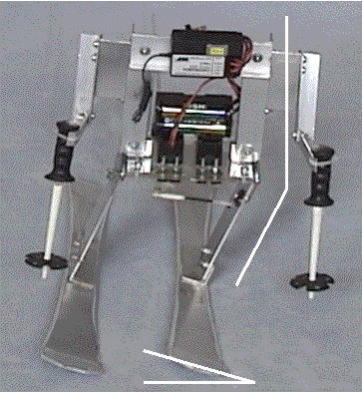
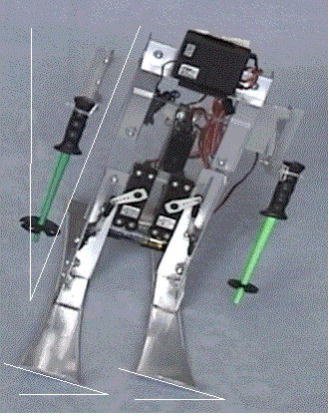
1. Es ist offensichtlich (Abb. 3), dass das Modell mit Oberschenkel-Rotation um seine Längsachse die Ski-Positionen der Schussfahrt, des Schneepfluges und der Schrägfahrt einnehmen kann. Diese Oberschenkel-Rotation kann als grundlegende Aktivität beim wirklichen Skifahren angesehen werden . Außerdem wurden für den Schneepflug (Abb. 4), den Stemmbogen (Abb. 5) und den Parallelschwung (Abb. 6), welche die grundlegenden Schwünge sind, die Schwung-Techniken reproduziert, die ähnlich denen des wirklichen Skifahrens sind. Die Beziehung zwischen grundlegender Ski-Position und grundlegender Schwung-Technik kann wie folgt erklärt werden: (1) Aus einer Schrägfahrt-Stellung, wenn der schwungäußere Oberschenkel einwärts gedreht wird, kann sich ein Schneepflug ergeben; (2) aus einer Schrägfahrt-Stellung, wenn beide Oberschenkel in die gleiche Richtung gedreht werden, kann sich ein Parallelschwung und Wedeln ergeben; (3) erste Schwunghälfte: aus einer Schrägfahrt-Stellung, wenn der schwungäußere Oberschenkel einwärts gedreht wird, kann sich eine Schneepflug-Stellung ergeben - zweite Schwunghälfte: aus der Schneepflug-Stellung, wenn der schwunginnere Oberschenkel auswärts dreht, kann sich eine Schrägfahrt-Stellung ergeben - so entsteht ein Stemmschwung. Das Modell mit Oberschenkel-Rotation zeigt deutlich, dass dies die wichtigste Bewegung für grundlegende Ski-Positionen und für grundlegende Schwung-Techniken sind.
 |
||||
| Ski-Positionen der Schussfahrt | ||||
 |
 |
 |
||
| Ski-Positionen des Schneepfluges | Ski-Positionen der Schrägfahrt | |||
| Abb.3 Beziehungen zwischen den Ski-Positionen bei der Schussfahrt, beim Schneepflug und bei der Schrägfahrt | ||||
 |
 |
 |
| Abb.4 Schneepflug | Abb.5 Stemmbogen | Abb.6 Parallelschwung |
2. Das Kombinations-Modell (Abb. 7) kann die Oberschenkel um ihre Achsen drehen und kann auch die Beine beugen und strecken. Dieses Modell ist in der Lage, viele Schwung-Techniken, die aktuell beim Skifahren benutzt werden, zu reproduzieren. Diese Schwung-Techniken sind die des Schneepfluges, des Stemmschwunges und des Parallelschwunges (Wedeln) - jeweils mit Hoch-/Tiefbewegungen.
 |
| Abb.7 Stemmschwung: Kombination von Beugung/Streckung der Beine mit der Oberschenkel-Rotation um seine Langsachse |
3. Ein Carving-Schwung (gefahren entlang den Kanten) entsteht, wenn die taillierten Ski durchgebogen und gekantet werden. Es zeigt sich, dass die Carving-Schwung-Modelle auch fahig sind: zur Adduktion und Abduktion im Hüftgelenk (Abb. 8), zur Beugung und Streckung der Beine (Abb. 9), und zur Innenlage (Abb. 10).
 |
 |
 |
|
Abb. 8 Modell für Adduktion |
Abb. 9 Modell für die Beugung und Streckung der Beine |
Abb. 10 Ein Innenlage-Modell |
4. Die Spitze des Innen-Skis wird im Pflugbogen wie in Abb. 11 angehoben (Top-Lift-Modell ); auch beim Stemmbogens (Abb. 12) wird die Spitze des Innen-Skis angehoben.
 |
 |
| Abb. 11 Modell des Pflugbogens mit Anheben der Innenski-Spitze (Zehetmayer-Modell) | Abb. 12 Modell des Stemmschwunges mit Anheben der Innenski-Spitze |
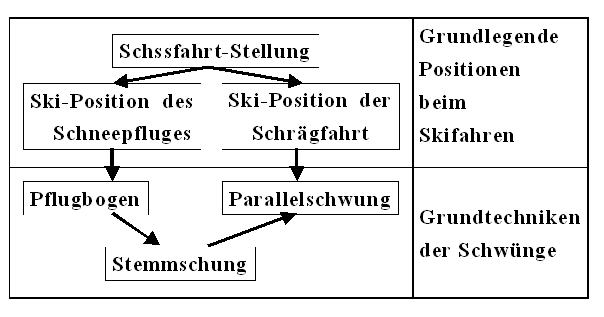
5. Alle Modelle zeigen, dass die Innen-Rotation des schwungäußeren Oberschenkels das wichtigste Element in der Bewegung des Skifahrers ist. Somit konnen sich Anwendungen für den Skiunterricht ergeben: vom Modell der Oberschenkel-Rotation, vom Kombinations-Modell ( Oberschenkel-Rotation kombiniert mit Beugung/Streckung der Beine - Abb.7) und vom Kombinations-Modell (Oberschenkel-Rotation kombiniert mit Adduktion/Abduktion im Huftgelenk - Abb. 13). Außerdem wird in Abb. 14 verdeutlicht, dass die Systematik grundlegender Ski-Positionen und Schwung-Techniken unter dem Aspekt der Oberschenkel-Rotation um sein Längsachse zusammengefasst werden kann.
 |
|
|
Abb. 13 Ein Kombinations-Modell: Oberschenkel-Rotation kombiniert mit Adduktion/ Abduktion in den Hüftgelenken |
 |
|
| Abb. 14 System von grundlegenden Ski-Positionen und Schwungtechniken |
6. Wenn die Kante durch das Biegen des taillierten Snowboards mit dem Schnee in Kontakt kommt, bildet die Kante einen Bogen. Das Snowboard fährt dann entlang diesem Kantenbogen (Carving-Schwung). Dieses Modell macht einen Schwung talwärts und teilweise einen Schwung bergauf entlang diesem Bogen (Abb. 15). Wenn der Snowboarder mehr auf dem vorderen Teil des Snowboards steht, ist das System Snowboarder/Snowboard (SS) in der Lage gedriftete Schwünge auszuführen ( Abb. 16).
 |
 |
| Abb. 15 Ein Snowboard-Modell mit Ausleger für wiederholte und automatische Carving-Schwünge | Abb. 16 Ein Snowboard-Modell mit Ausleger für wiederholte und automatische Drift-Schwünge |
7. Beim Prototyp-Modell (Abb. 17) führt die Vorlage des Snowboarders (zur Zehenseite) zum Frontside-Turn und die Rücklage (zur Fersenseite) führt zum Backside-Turn: Um einen Frontside-Turn zu machen, werden die Fußgelenke gebeugt (Dorsal-Extension), und um einen Backside-Turn zu machen, werden die Fußgelenke gestreckt (Plantar-Flexion) (Abb. 18). Um einen Frontside-Turn zu machen, werden die Knie gestreckt, und um einen Backside-Turn zu machen, werden die Knie gebeugt (Abb. 19). Um einen Frontside-Turn zu machen, werden die Hüften gebeugt, und um einen Backside-Turn zu machen, werden die Hüften gestreckt (Abb. 20). Durch die Konstruktion, den Gebrauch, die Beobachtung und die Analyse solcher Modelle können wir einige wichtige Aktivitäten des Snowboarders erschließen. Zum Beispiel sind das Kanten und die Verlagerung des Körperschwerpunktes zur Schwunginnen-Seite wichtige Bewegungen, um Schwünge beim Snowboarden zustande zubringen. Speziell durch die Verlagerung des Körperschwerpunktes zur Vorderseite des Snowboardes, wird die Fahigkeit des Snowboarders, gedriftete Schwünge zu machen erleichtert.
 |
 |
|
Abb. 17 Ein Prototyp Modell eines Snowboard/Snowboarder Systems |
Abb. 18 Ein Modell mit Dorsal-Extension (Beugung) und Plantar-Flexion (Streckung) der Fußgelenke |
 |
 |
| Abb. 19 Ein Modell zum Beugen und Strecken der Kniegelenke |
Abb. 20 Ein Modell zum Beugen und Strecken der Hüftgelenke |