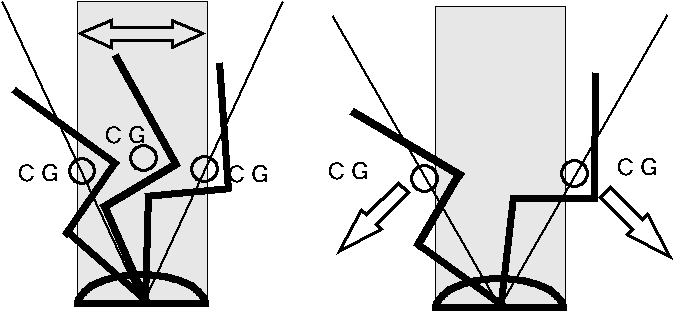
| 図のように、スノーボードとスノーボーダーの形状(基本動的姿勢)を想定した単純なモデルを考える。ここでターンに伴って生じる遠心力や重心移動によるスノーボードへの反作用を無視した場合、スノーボードの幅の範囲内で、重心位置(CG)をスノーボーダーの前方・後方に移動しても、スノーボードの幅の内側にあるときにはSS系(スノーボードとスノーボーダーの系)は転倒しない(図左)。しかしスノーボードの幅を超えて重心位置が移動するときにはSS系は転倒する(図右)。またスノーボードの幅が狭すぎると支持基底面が狭くなり、重心位置の僅かな移動でも転倒しやすくなる。 ここでスノーボーダーの重心位置がスノーボードの幅の内側から外側に移動するときを考えてみる。図左ではスノーボードには角付けがなされていない(平踏み)が、図右ではSS系が傾きスノーボードの片側のエッジが角付けられてくる。さらに、そのままにしておくと重心位置がスノーボードの幅を超えて転倒してしまう。転倒する直前では片側のエッジが角付けられているので、もし片側のエッジが角付けされた状態を保つことができれば、スノーボードにサイドカットとたわみによる有効サイドカーブが生じ、ターンすることが可能である |
|
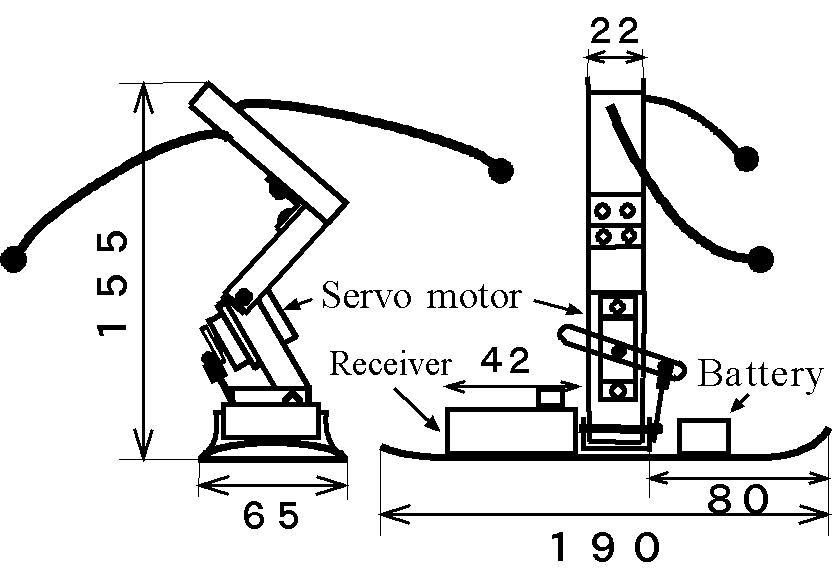
| 制作したスノーボードロボットの構造を図に示した。操作はラジオコントロールによる遠隔操作(Futaba
ATTACK T2DR)により行った。サーボモータ(Futaba S3102 Micro servo)1個により、足関節は65度を標準として底屈(足首の伸ばし)と背屈(足首の曲げ)ができるように構成した。なおビス止めにより股関節は90度、膝関節は110度で固定した。 スノーボードロボットの大きさは、下腿長60mm、大腿長65mm、上体長80mmであり、高さは155mmであった。またスノーボードの長さは190mm、ショルダー65mm、ウェスト45mm、ヒール55mmであった。なおスノーボードのサイドカットの半径は約230mmであった。 またスノーボードロボットの全質量は160gであり、スノーボーダーが80g、スノーボードが80gであった。 |
 |
|
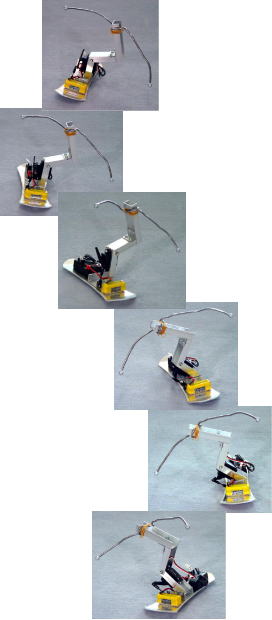
| この足関節の底屈・背屈モデルによる連続ターンは以下のように行う。まず図の連続写真のように、スノーボーダーの足関節を底屈すると重心位置がスノーボーダーの後方に移動してスノーボードが左側に傾くようになる。するとスノーボードの左側の有効サイドカーブが働き、左ターンが行われる。ターンの後半、目視により足関節を背屈すると、重心位置はスノーボーダーの前方に移動してスノーボードの右側に傾くようになる。するとスノーボードの右側の有効サイドカーブが働き、右ターンが行われる。このようにして、足関節の底屈と背屈の1自由度の動作によって、スノーボードの連続ターンを行うことができた。 |
 |
| スノーボードにある程度の幅を持たせ、サーボモータを1個取り付けて、スノーボーダーが、足関節の底屈・背屈によりスノーボードの左右のエッジ側に重心移動できるスノーボードロボットを製作した。スノーボードには有効サイドカーブが働くように、サイドカットのあるスノーボードを使用した。サーボモータは目視により制御されるが、足関節の底屈・背屈により、スノーボーダーをターンの内側に傾けるだけで連続ターンが可能になった。すなわち、スノーボーダーの足関節の底屈・背屈によるターン内側への重心の移動とスノーボードのサイドカットおよび幅が、スノーボードの連続ターンにとって重要な要素であることが明らかになった。 参考:清水史郎、長谷川健二(2003):スノーボードロボットの開発−足関節の底屈・背屈モデル−、スキー研究、1(1)、9-13. |
![]()